Dopo un lungo periodo di esperimenti e di fatica finalmente sono arrivato alla prima fase del piccolo progetto.
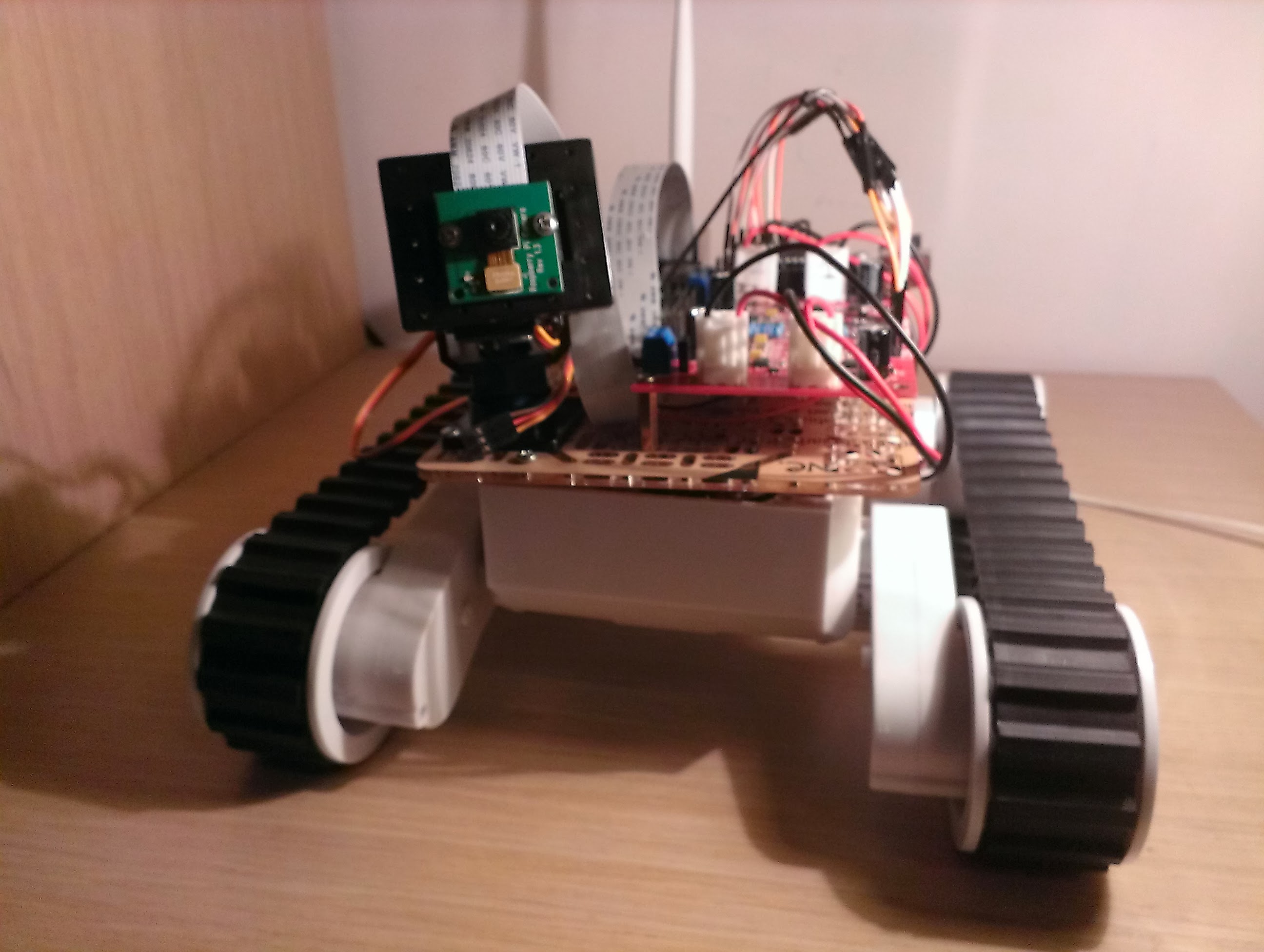
Dai questo video il rover che muove i suoi primi passi in casa... con qualche problema..
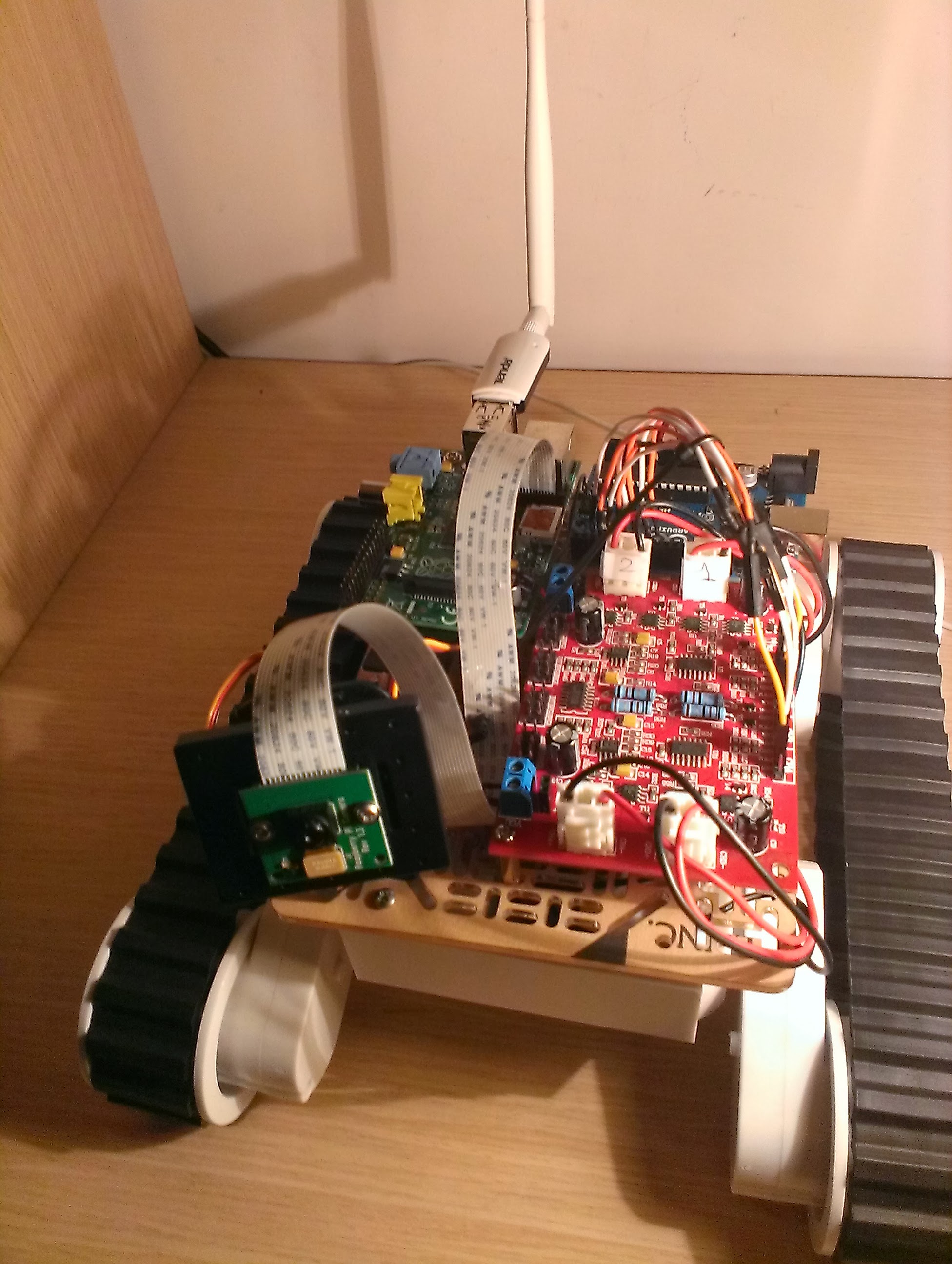
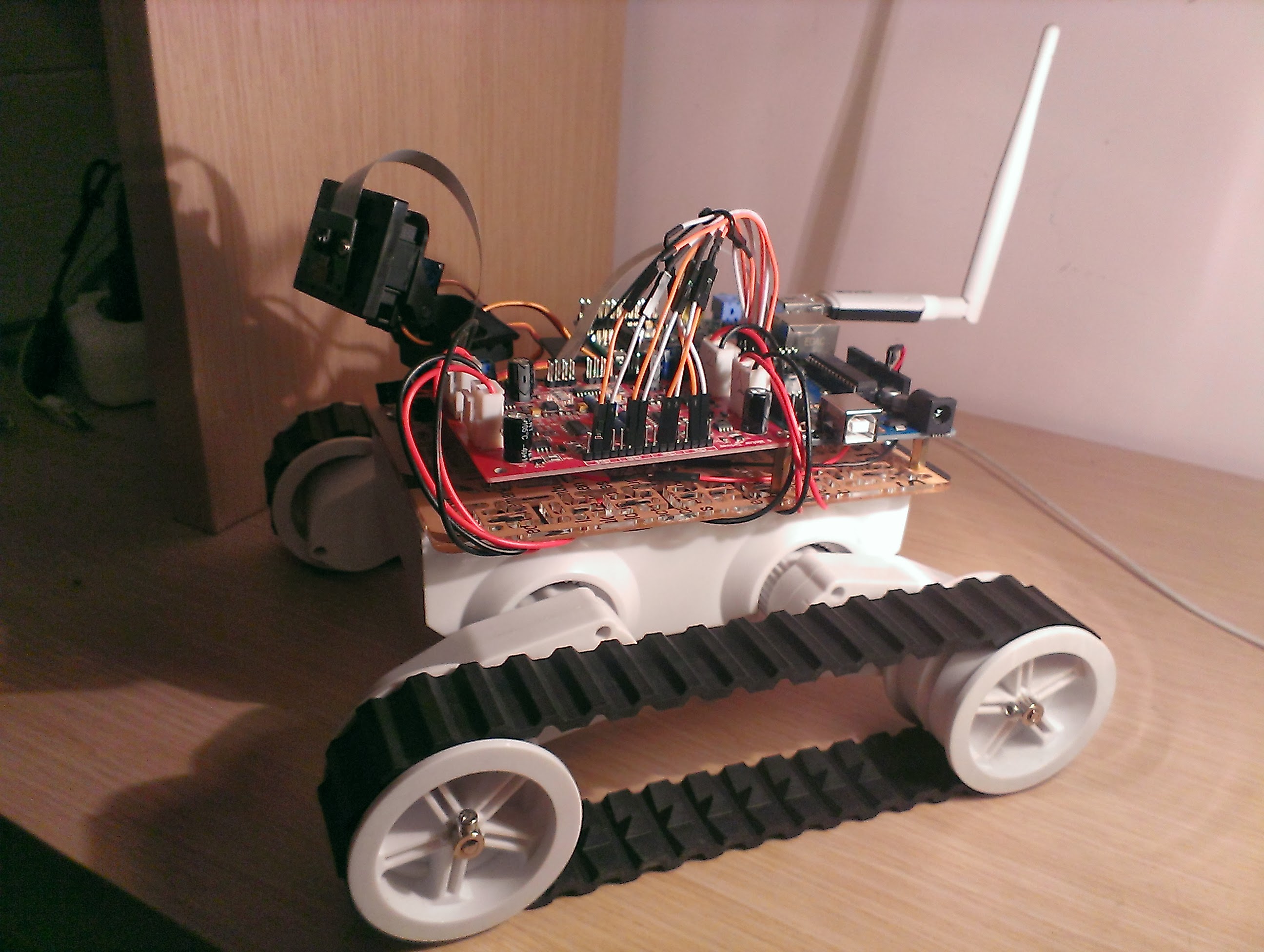
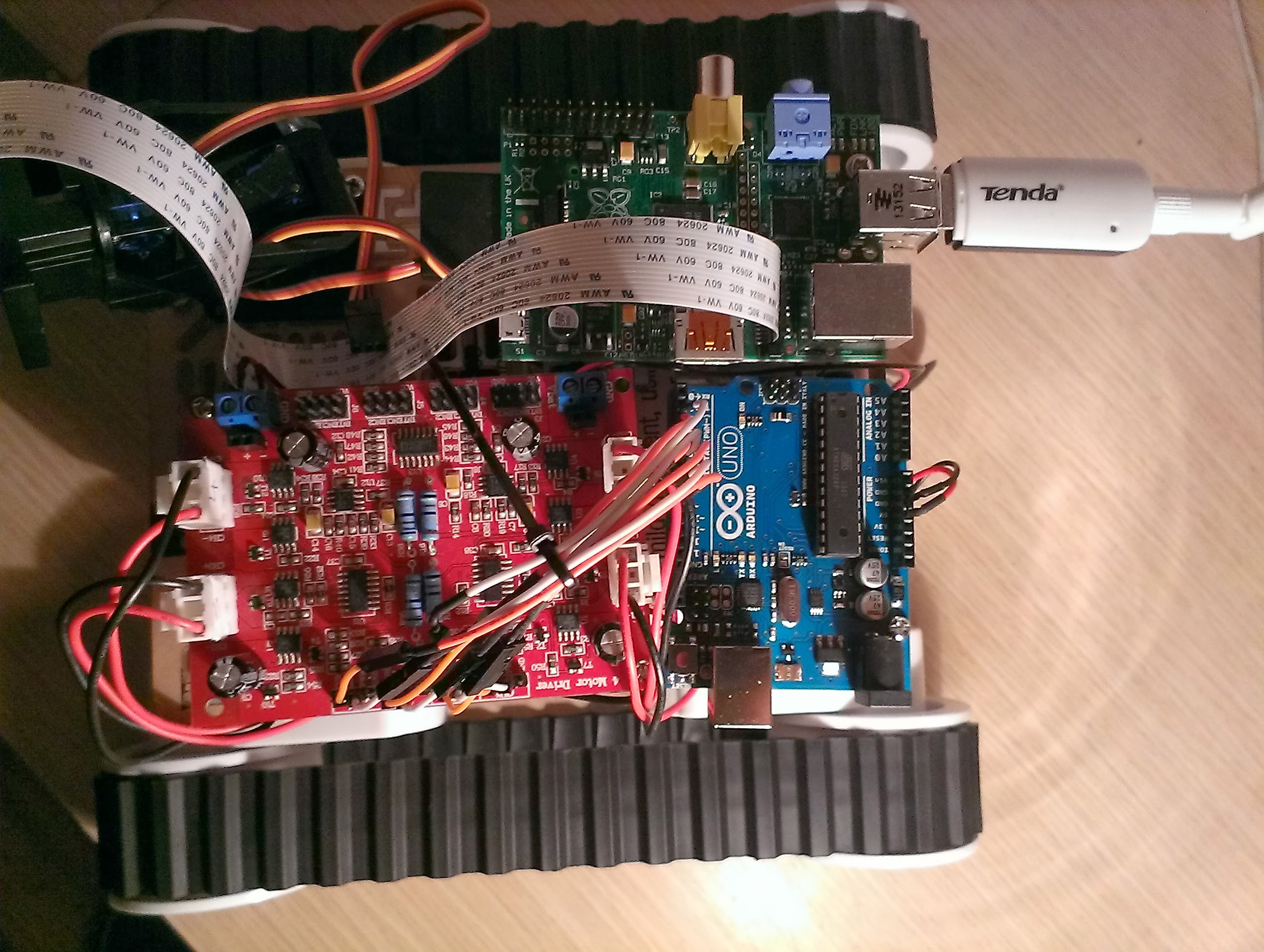
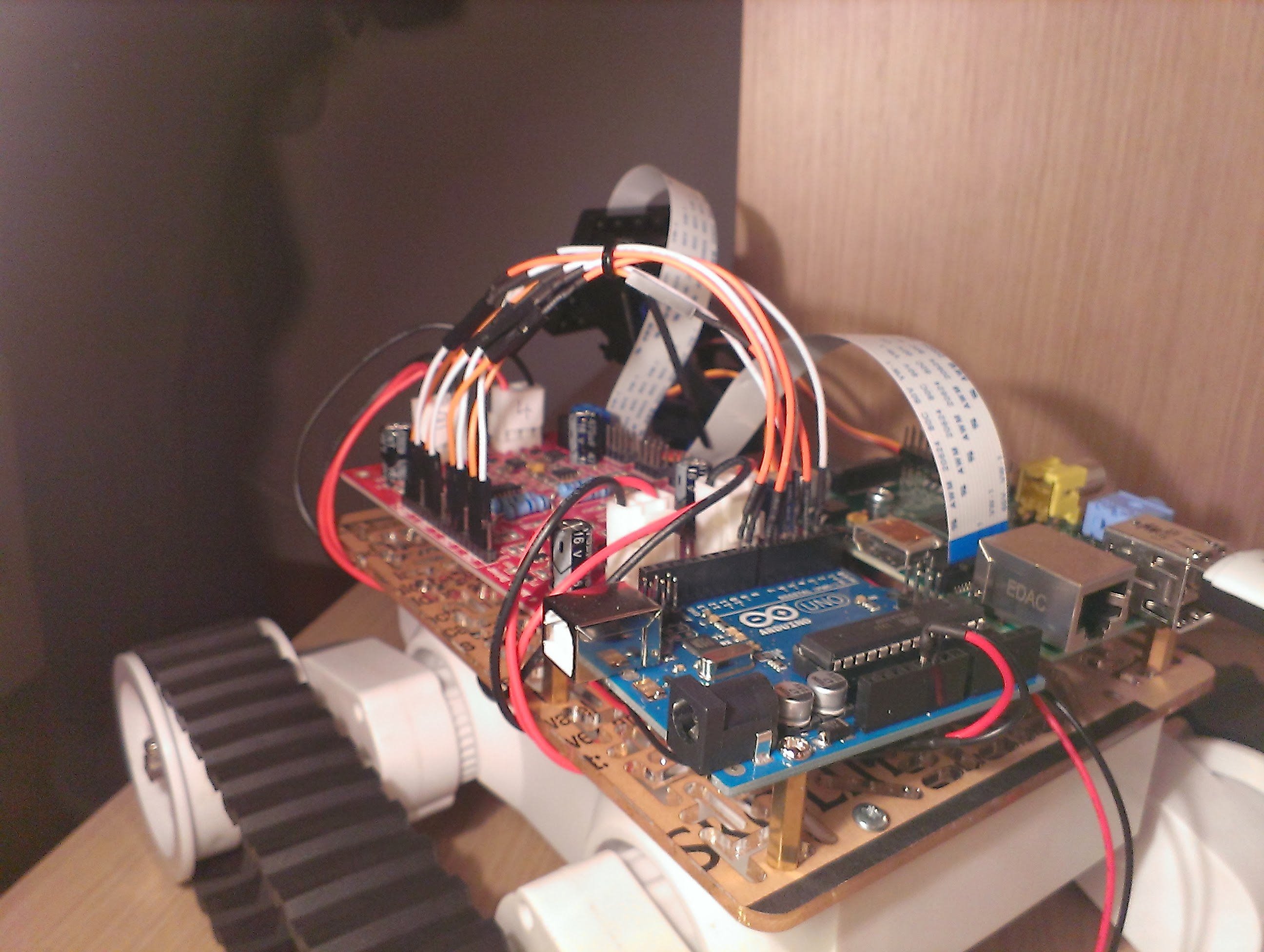
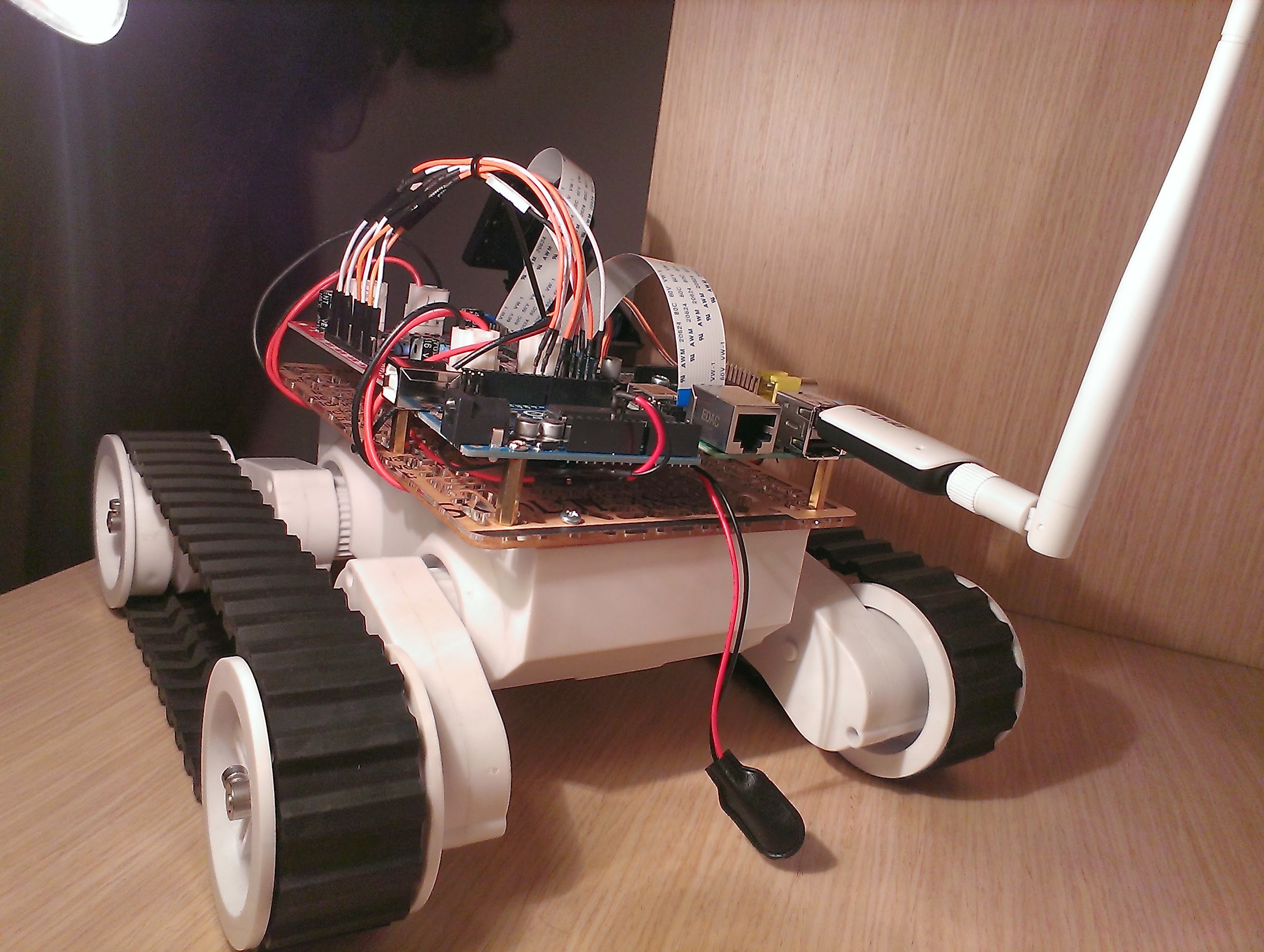
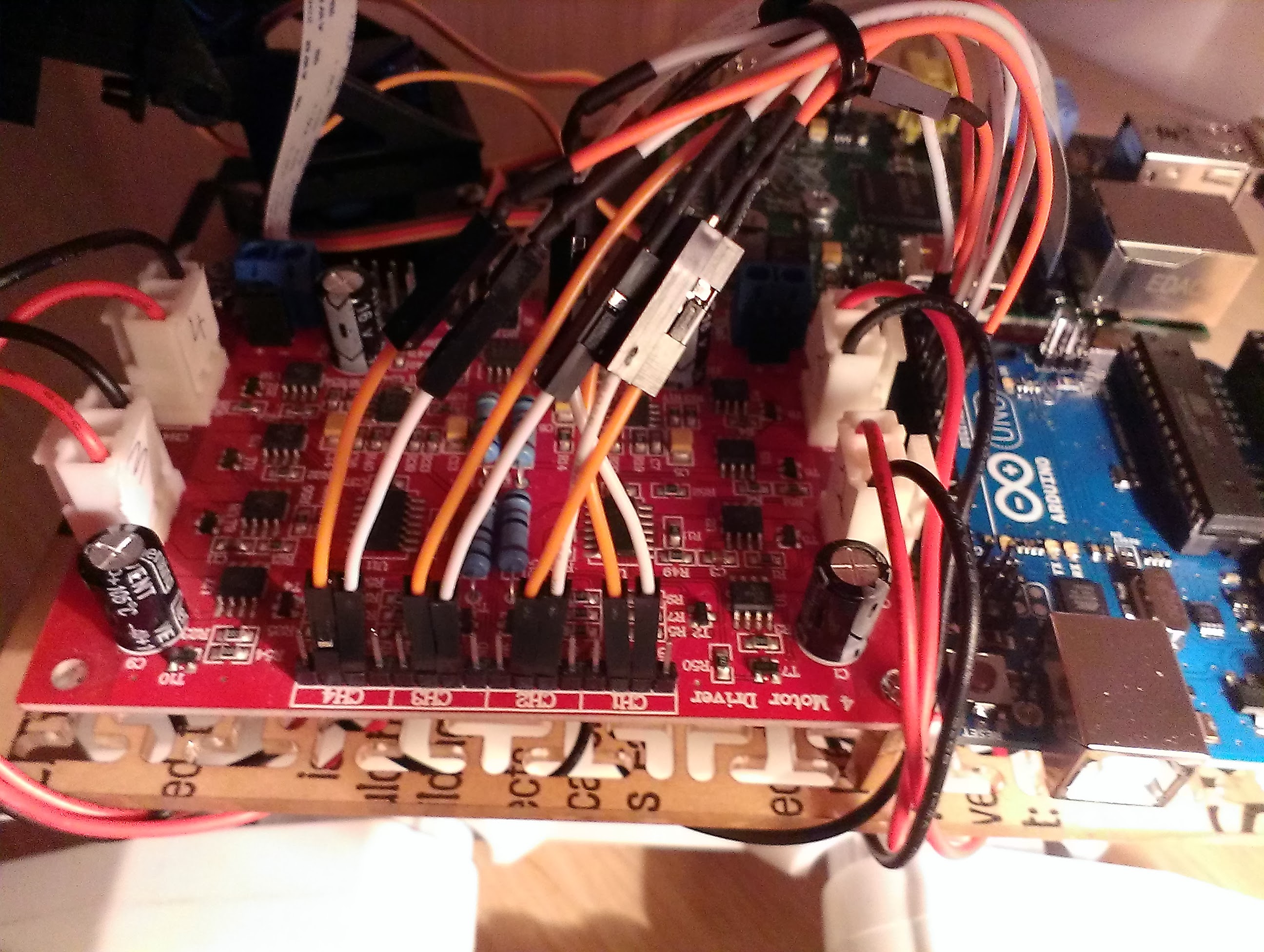
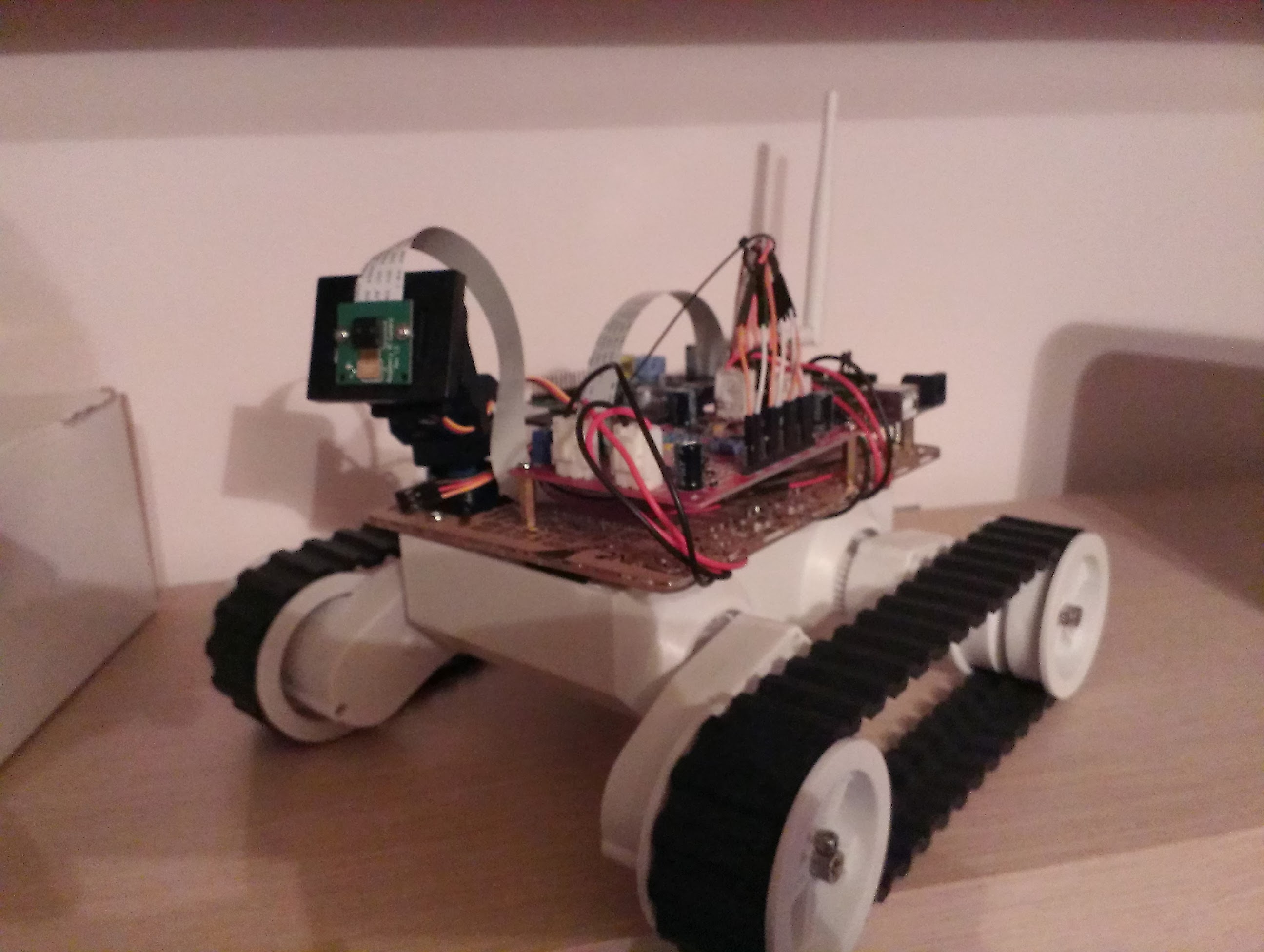
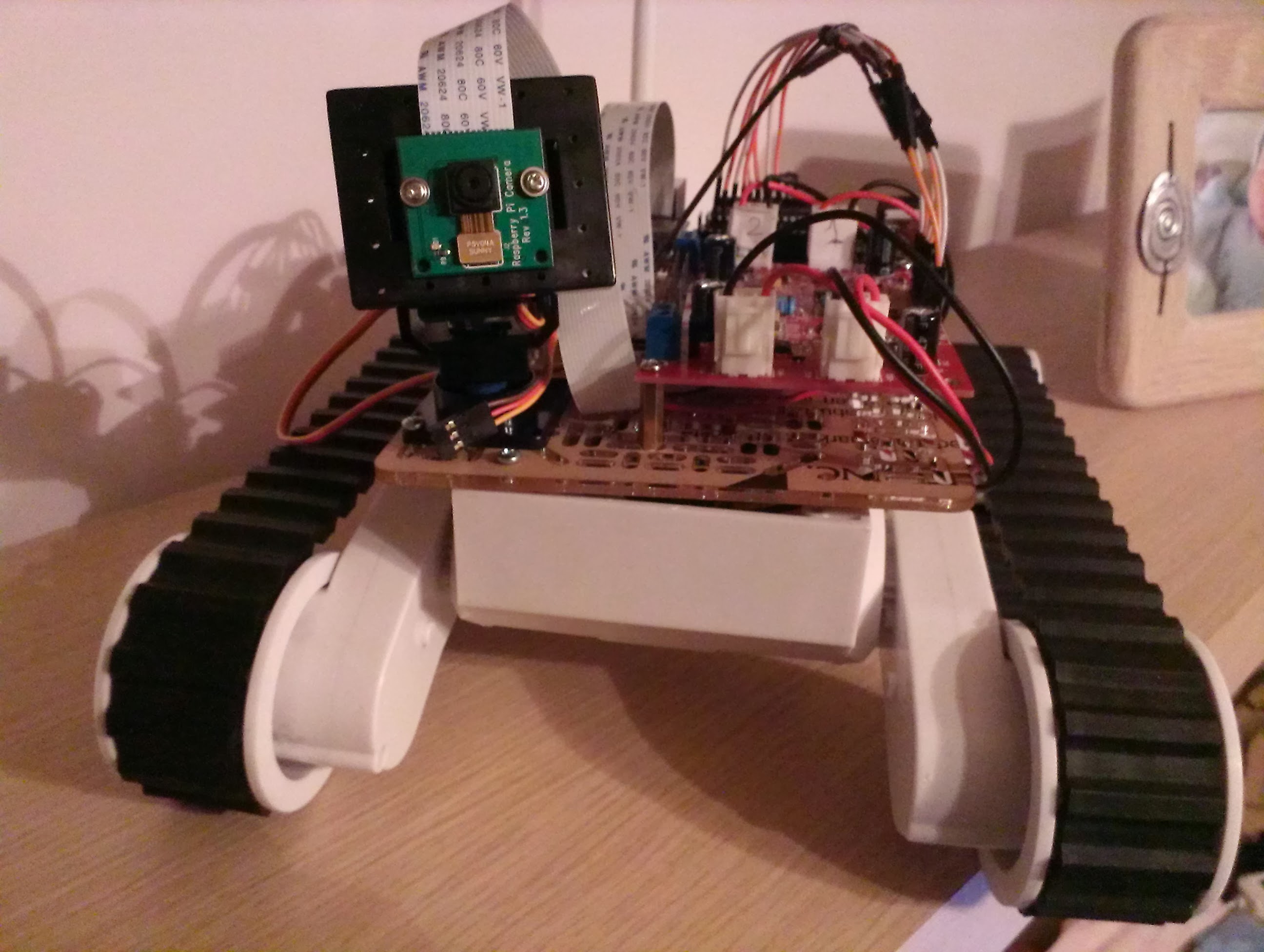
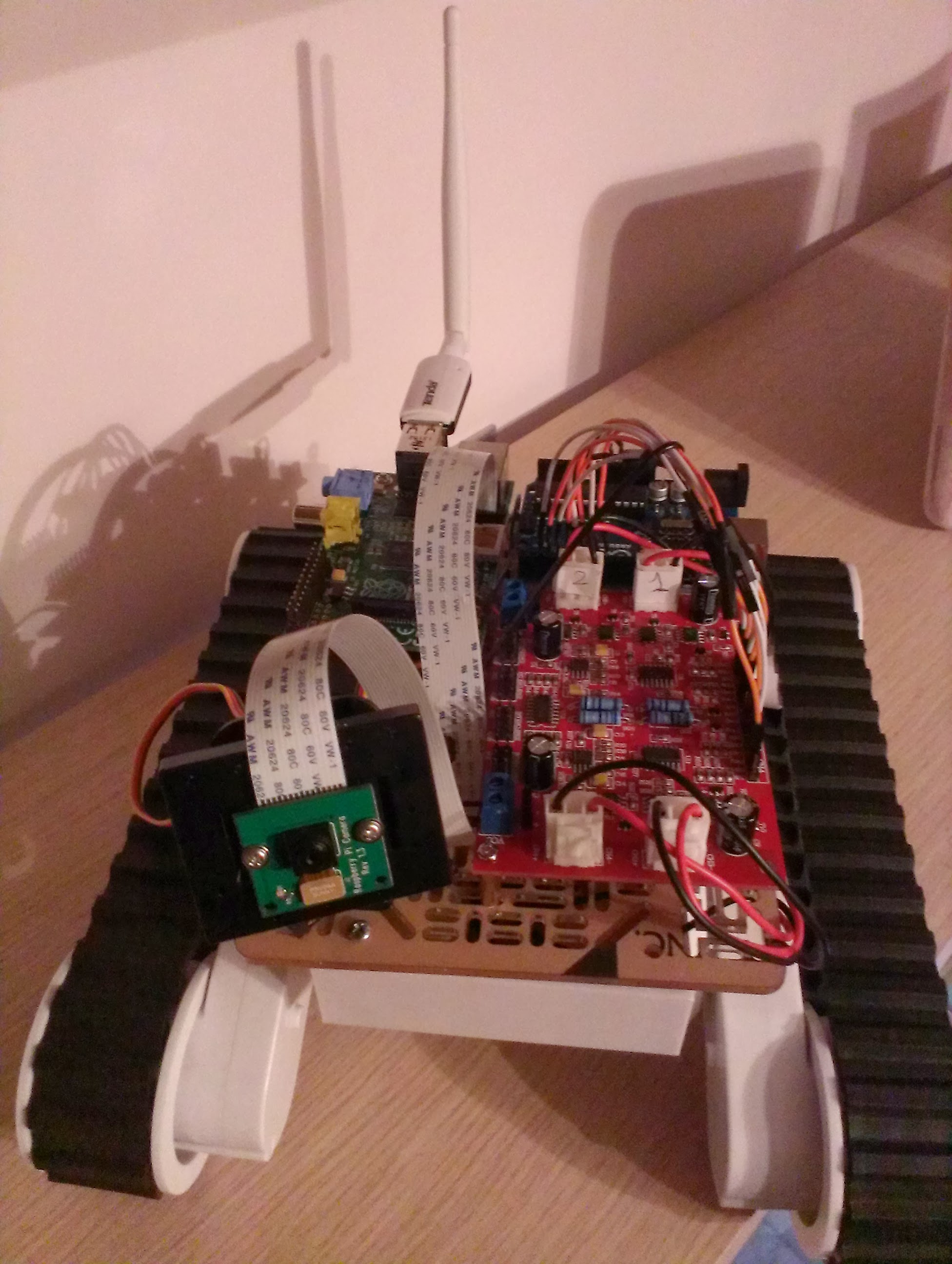
L'hw è un mix di arduino per il controllo dei motori edella tilt pan per la Cam, Raspberry che gestisce lo streaming della cam sulla rete, e la parte web con node.js. Mancano alcuni dettagli che sistemerò a giorni.
Tutti i sorgenti, le specifiche e l'hw potete trovarlo sul GitHub

link on GitHub Site
Nessun commento:
Posta un commento