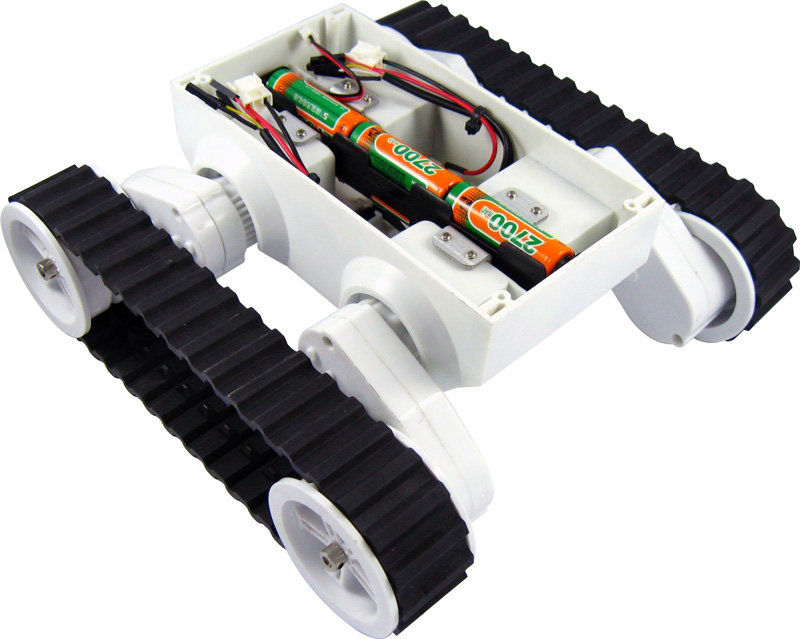
Proseguono gli esperimenti con il Raspberry PI, preso da una frenesia di acquisti notturni ho comprato questo spettacolare rover con la scheda di controllo per i motori.
Hardware
Per il Raspberry Utilizzo la distribuzione standard presente sul sito, ho tolto X ed aggiunto la java-openjdk per utilizzare appunto java più alcune utility (joe, htop, etc), tutto comodamente utilizzando apt-get install.
La comunicazione avviene tramite wifi applicando una chiavetta al raspberry in modo da mantenerlo autonomo da cavo di rete.
Prima problema.. mi sono accorto che l'uscita digitale GPIO del Rapsberry è a 3.3V invece la scheda di controllo dei motori del dagu funziona su un segnale a 5 volt like Arduino. Quindi devo cercare un convertitore di segnale.. eccolo!!! Tindie converter gpio da 3 a 5v
Primi test.
Dopo vari esperimenti e ricerche trovo questa schedina che converte tutti i segnali del gpio a 5v. Proprio quello che serve per il controller del rover.
I primi esperimenti veloci dell'hardware sono con Nodejs e una piccola lib node-gpio semplice e veloce.
Materiale
Cavetti
Raspberry pi
ecco il tutto montato e pronto:
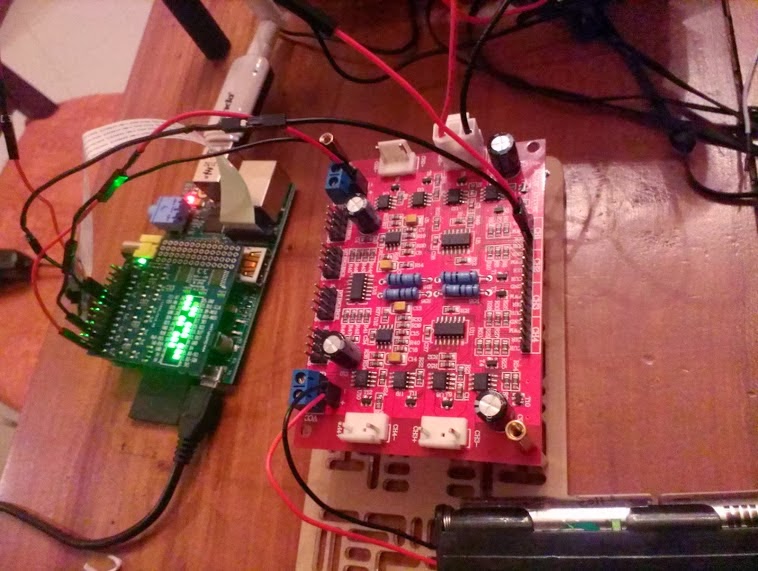


Primi esperimenti con python e nodejs... subito salta fuori il problema della programmazione parallela del gpio non molto semplice da risolvere. Se non risolvo la cosa sarà facile che passerò ad Arduino.... ufff....
ecco il tutto montato e pronto:
Primi esperimenti con python e nodejs... subito salta fuori il problema della programmazione parallela del gpio non molto semplice da risolvere. Se non risolvo la cosa sarà facile che passerò ad Arduino.... ufff....
Nessun commento:
Posta un commento